球磨機(jī)系統(tǒng)的仿真研究
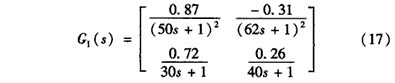
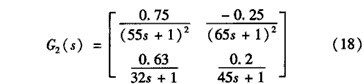
基于球磨機(jī)系統(tǒng)的時變性,采用多個模型描述其動態(tài)特性。系統(tǒng)輸出信號Y=[TP]T,輸入信號U=[RW]T,則被控對象可描述為Y=GU。其中,T為磨出口溫度,P為傳遞函數(shù)矩陣。文獻(xiàn)對某球磨機(jī)在不同工況下的運(yùn)行情況進(jìn)行辨識,得到不同工況下相互耦合的溫度和負(fù)壓回路的兩模型如下:
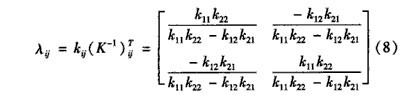
按照G1(s)進(jìn)行設(shè)計,由下公式(8)可知系統(tǒng)的相對增益矩陣為
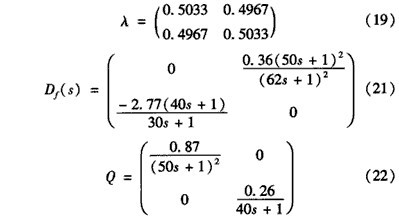
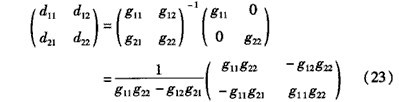
由公式(19)可知配對方式選擇對角線配比,即熱風(fēng)量R控制溫度T,再循環(huán)風(fēng)量W控制負(fù)壓P,負(fù)荷工藝要求。按照表1求得此球磨機(jī)系統(tǒng)的逆向解耦控制器為:

解耦后的被控對象變?yōu)閮蓚€單回路系統(tǒng),即將本例與傳統(tǒng)的對角矩陣解耦控制方法比較,把對角矩陣解耦控制中的解耦控制器記為D,期望的對角矩陣仍為Q,則有:
雖然逆向解耦和對角陣解耦均可將球磨機(jī)系統(tǒng)解耦成兩個單回路系統(tǒng),但由分析可知該對解耦矩陣含有s的6次項(xiàng),實(shí)際構(gòu)造結(jié)構(gòu)太復(fù)雜,不利于工程實(shí)現(xiàn),并且計算量很大。而逆向解耦控制器結(jié)構(gòu)簡單,動態(tài)解耦效果良好,易于物料實(shí)現(xiàn),突顯了其適合與高階的過程對象解耦的優(yōu)點(diǎn)。
對解耦后的廣義被控制對象進(jìn)行內(nèi)模控制器設(shè)計,得內(nèi)模控制器為:
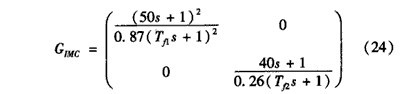
其中的 ,
, 為濾波器的時間常數(shù),其值通過Simulink進(jìn)行防真求得。根據(jù)控制輸出的動態(tài)性能求得濾波器的時間常數(shù)
為濾波器的時間常數(shù),其值通過Simulink進(jìn)行防真求得。根據(jù)控制輸出的動態(tài)性能求得濾波器的時間常數(shù) 。
。
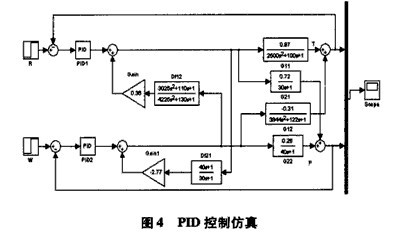
根據(jù)前問介紹的IMC-PID轉(zhuǎn)換方法得到本系統(tǒng)PID控制器參數(shù)為:

根據(jù)此參數(shù)對加解耦合的廣義被控制對象進(jìn)行PID控制器設(shè)計及Simulink仿真,如圖4所顯示。
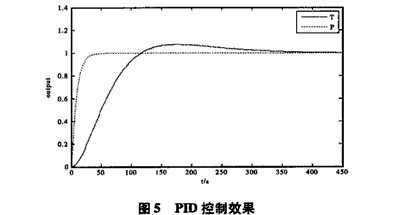
PID控制的階躍響應(yīng)控制仿真結(jié)果如下圖5所顯示。
基于球磨機(jī)系統(tǒng)的時變性,當(dāng)被對象由G1(s)變?yōu)镚2(s)時,驗(yàn)證所設(shè)計的PID控制器對被控對象的魯棒性,仿真結(jié)構(gòu)如下圖6所顯示。
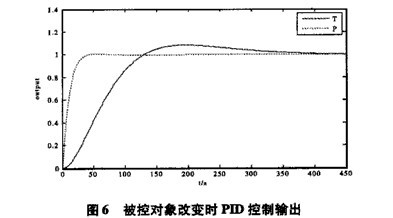
由上圖5和圖6的仿真曲線可以看出,在標(biāo)稱情況下,磨出口溫度和磨入口負(fù)壓的階躍響應(yīng)的動態(tài)性能參數(shù)良好,超調(diào)較小,響應(yīng)速度較快,基本無耦合作用。并且在當(dāng)被控對象改變時,所整定的PID控制器不僅有良好的調(diào)節(jié)性能還有很好的魯棒性能,其系統(tǒng)輸出響應(yīng)性能指標(biāo)沒有惡化。




相關(guān)產(chǎn)品
推薦新聞
常見問題解答
- 優(yōu)化磨礦,提高價值:選礦球磨機(jī)選型與操作策略!
- 石英砂球磨機(jī):簡述其結(jié)構(gòu)性能與應(yīng)用優(yōu)勢
- 赤鐵礦再生利用的理想選擇——球磨機(jī)優(yōu)勢解析
- 鋰輝石選擇球磨機(jī)磨粉有哪些優(yōu)勢,多少錢一臺?
- 高細(xì)水泥球磨機(jī)的工作原理及價格簡介
- 長石選礦節(jié)能球磨機(jī)工作原理及價格簡介
- 球磨機(jī)內(nèi)部結(jié)構(gòu)圖詳解(圖片解析)
- 節(jié)能球磨機(jī)
- 輸送機(jī)
- 濕式球磨機(jī)
- 格子球磨機(jī)
- 選礦球磨機(jī)
- 水泥球磨機(jī)
- 污泥烘干機(jī)