球磨機系統的BEL模型辨識算法
本文是利用BEL模型建立球磨機系統的正向模型和逆模型。
一、球磨機系統正向模型辨識
基于BEL模型在線辨識球磨機正向模型的結構圖如所顯示。
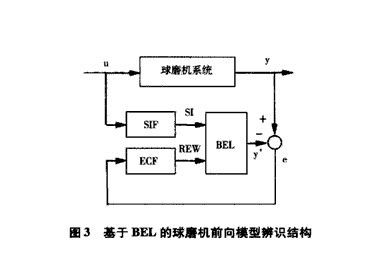
其中SIF為感官輸入函數,ECF為情感暗示函數,u為球磨機系統控制輸入,y為球磨機系統輸出,y為BEL向辨識模型輸出,e為辨識誤差。BEL模型與球磨機并聯,輸出誤差用來調整BEL模型鏈接權值。
BEL與實際系統相差,必須首先確定輸入信號SI和REW的函數形成,它們與系統輸入輸出和誤差有關。一般選擇SI為系統輸入u、誤差信號e和系統輸出y的函數,REW為誤差信號e、BEL模型輸出MO或系統輸出y的函數,REW為誤差信號e、BEL模型輸出MO或系統輸出y的函數,本文選擇SI和REW形式如下:
SI=F(u)=k1u(t) REW=J(e)=k2e(t)+k3∫e(t)dt其中,k1、k2、k3為權重調節系數。
二、球磨機系統逆橫型辨識
基于BEL模型在辨識球磨機正向模型的結構如下圖所顯示。
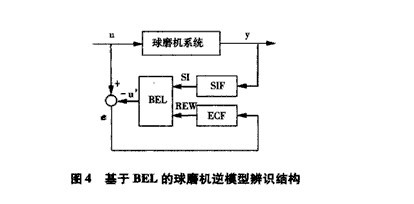
系統輸出y和誤差e經過SIF和ECF作為BEL輸入,經過情感學習后,BEL模型輸出與求o既系統輸入信號u趨于一致。在球磨機系統逆模型辨識結構中,選擇SI和REW形式如下:
SI=F(y)={r1y(t) r2y(t)} REW=J(e)=r3e(t)+r4∫e(t)dt 其中,r1、r2、r3、r4為權重調節系數。
采用BEL辨識球磨機系統的算法步奏如下:
1、設定BEL模型輸入信號SI和REW和重調節系數k1~k2、r1~r4,BEL模型權值學習率a、β,杏兒體和眶額皮質節點權值Vi 、Wi初始化為零;
2對正向模型辨識依據式(SI=F(u)=k1u(t) )、(REW=J(e)=k2e(t)+k3∫e(t)dt)計算SI和REW,逆模型辨識則依據式(SI=F(y)={r1y(t))、(REW=J(e)=r3e(t)+r4∫e(t)dt)計算SI和REW;
3、利用式 和
和 分別計算杏兒體輸出A和眶額皮質輸出0;
分別計算杏兒體輸出A和眶額皮質輸出0;
4、利用式(MO=A-O)計算BEL模型輸出y(正向模型)或者u(逆模型),與球磨機系統輸出y(正向模型辨識)或球磨機系統輸入信號u(逆模型辨識)或球磨機系統輸入信號u(逆模型辨識)進行比較得辨識誤差e;
5、根據( )、(
)、( )分別調BEL模型節點權值Vi、Wi;
)分別調BEL模型節點權值Vi、Wi;
6、若精度滿足要求或達到設定實際,計算停止,否側轉2。
上一篇:球磨機閉路系統的篩分和改造方法
下一篇:球磨機主軸承的技術改造方案